
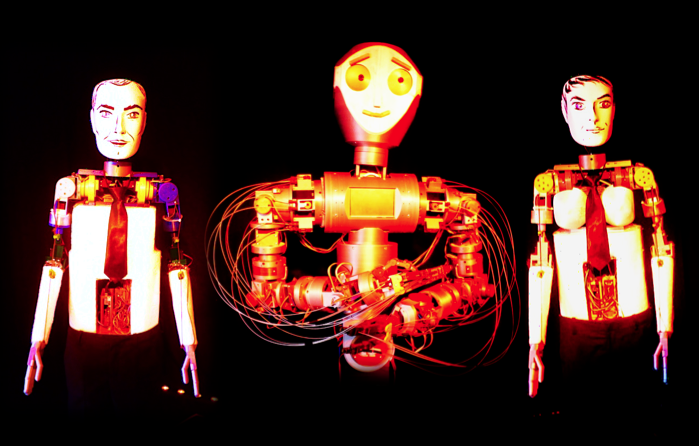
 Über Roberry hat das Projekt Kraftzwerk überhaupt erst begonnen. Ein Freund fragte “Und was soll der mal können?” – und mir kam spontan Musik machen in den Sinn. Nach einigen Späßen darüber (der Name Kraftzwerk war einer davon) nahm das Ganze auf einmal Gestalt an. Derzeit hat Roberry 36 Servos im Einsatz, im Endausbau werden es voraussichtlich um die 70 sein.
Über Roberry hat das Projekt Kraftzwerk überhaupt erst begonnen. Ein Freund fragte “Und was soll der mal können?” – und mir kam spontan Musik machen in den Sinn. Nach einigen Späßen darüber (der Name Kraftzwerk war einer davon) nahm das Ganze auf einmal Gestalt an. Derzeit hat Roberry 36 Servos im Einsatz, im Endausbau werden es voraussichtlich um die 70 sein.
Wie die Basteleien anfingen ist in der Historie zu sehen.
Der Kopf
Im Gesicht kann Roberry die Augenbrauen kippen, beide Augen unabhängig in X- und Y-Achse bewegen so wie die Mundwinkel bewegen. Hierdurch sind erstaunlich viele Gesichtsausdrücke möglich. 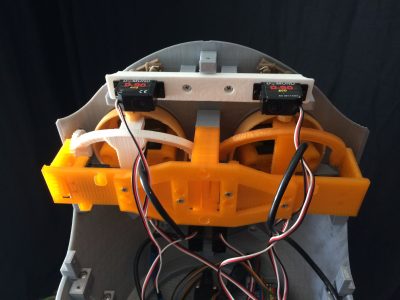 Da die Mechanik im Kopf relativ klein ist kommen hier die kleinen D90-Servos zum Einsatz. Da in diese die OpenServo-Elektronik nicht rein passt werden diese noch über PWM angesteuert.
Da die Mechanik im Kopf relativ klein ist kommen hier die kleinen D90-Servos zum Einsatz. Da in diese die OpenServo-Elektronik nicht rein passt werden diese noch über PWM angesteuert.  Hierfür wird eine klassische PCA9685-Platine verwendet wodurch die Steuerung auch über den I2C-Bus läuft.
Hierfür wird eine klassische PCA9685-Platine verwendet wodurch die Steuerung auch über den I2C-Bus läuft. 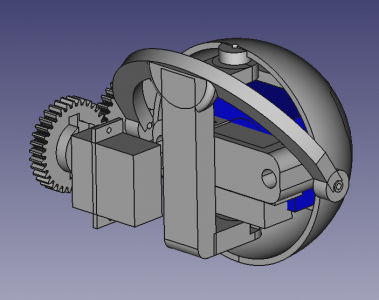 Die Augen sind je mit einer Webcam ausgerüstet (im Bild links blau dargestellt) wodurch ein stereoskopische Sehen implementiert werden kann. Hier ist eine Kombination aus klassischer Programmierung (Vektorisierung der Bilder) und einem KI-Ansatz zur Objekterkennung geplant. Der Hals ist mit einem Drehgelenk und einem klassischen X-Y-Gelenk wie in den Armen verbaut ausgestattet, wodurch Nicken, Kopf schütteln und Kopf seitlich Neigen möglich ist.
Die Augen sind je mit einer Webcam ausgerüstet (im Bild links blau dargestellt) wodurch ein stereoskopische Sehen implementiert werden kann. Hier ist eine Kombination aus klassischer Programmierung (Vektorisierung der Bilder) und einem KI-Ansatz zur Objekterkennung geplant. Der Hals ist mit einem Drehgelenk und einem klassischen X-Y-Gelenk wie in den Armen verbaut ausgestattet, wodurch Nicken, Kopf schütteln und Kopf seitlich Neigen möglich ist.
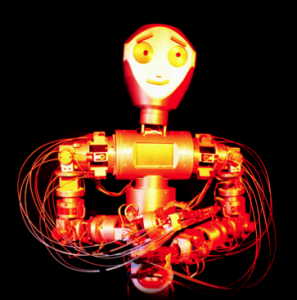
Der Oberkörper
 Das wichtigste am Oberkörper von Roberry ist das ebenso elegant wie auch höchst aufwändig designte deMaus-Logo im unteren Bereich. Dieses erfüllt im Gegensatz zu dem Gelenk dahinter hervorragend seinen Zweck. Das Gelenk dahinter war zum seitlichen Neigen des Oberkörpers gedacht, ist aber trotz drei eingesetzten Motoren und einer recht starken Untersetzung zu schwach. Entsprechend habe ich dieses derzeit festgesetzt. Eine Neukonstruktion mit Federn, die die Hauptlast des Kippmoments aufnehmen, ist in Planung.
Das wichtigste am Oberkörper von Roberry ist das ebenso elegant wie auch höchst aufwändig designte deMaus-Logo im unteren Bereich. Dieses erfüllt im Gegensatz zu dem Gelenk dahinter hervorragend seinen Zweck. Das Gelenk dahinter war zum seitlichen Neigen des Oberkörpers gedacht, ist aber trotz drei eingesetzten Motoren und einer recht starken Untersetzung zu schwach. Entsprechend habe ich dieses derzeit festgesetzt. Eine Neukonstruktion mit Federn, die die Hauptlast des Kippmoments aufnehmen, ist in Planung.  Der darauf sitzende Rumpf bietet Platz für vier Raspberry Pi. Derzeit ist nur eine eingebaut da nur vorkonfigurierte Bewegungsabläufe ausgeführt werden. Diese brauchen nur eine sehr geringe Rechenleistung.
Der darauf sitzende Rumpf bietet Platz für vier Raspberry Pi. Derzeit ist nur eine eingebaut da nur vorkonfigurierte Bewegungsabläufe ausgeführt werden. Diese brauchen nur eine sehr geringe Rechenleistung. 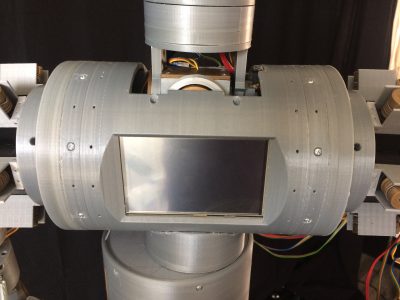 Der Brustbereich enthält einen berührungsempfindlichen Bildschirm, in dem zukünftig der Status von Roberry angezeigt werden soll oder einfache Steuerungsfunktionen ausgeführt werden können.
Der Brustbereich enthält einen berührungsempfindlichen Bildschirm, in dem zukünftig der Status von Roberry angezeigt werden soll oder einfache Steuerungsfunktionen ausgeführt werden können.  Der Platz hinter dem Monitor wird zum Teil von den Gelenken vom Hals, den Schultern und dem Drehgelenk zum Drehen des Brustbereichs auf dem Rumpf eingenommen. Zusätzlich ist hier eine der wichtigsten Verkabelungspunkte. Die I2C-Ports von den im Rumpf eingebauten Raspberry Pi sind hier über Steckkontakte erreichbar. Weiter sind hier Treiberbausteine für die I2C-Ports vorhanden die von dem 3,3V-Level der Raspberry auf den 5V-Level der OpenServo-Platinen wandeln. Im linken Bereich sind Anschlüsse für die Servos vorhanden, die neben den Leitungen des I2C-Bus auch die Stromversorgung für die Motoren der Servos enthalten. Die Servos arbeiten mit getrennten Stromversorgungen für die Elektronik und die Motoren um Spannungseinbrüche für die Elektronik zu vermeiden.
Der Platz hinter dem Monitor wird zum Teil von den Gelenken vom Hals, den Schultern und dem Drehgelenk zum Drehen des Brustbereichs auf dem Rumpf eingenommen. Zusätzlich ist hier eine der wichtigsten Verkabelungspunkte. Die I2C-Ports von den im Rumpf eingebauten Raspberry Pi sind hier über Steckkontakte erreichbar. Weiter sind hier Treiberbausteine für die I2C-Ports vorhanden die von dem 3,3V-Level der Raspberry auf den 5V-Level der OpenServo-Platinen wandeln. Im linken Bereich sind Anschlüsse für die Servos vorhanden, die neben den Leitungen des I2C-Bus auch die Stromversorgung für die Motoren der Servos enthalten. Die Servos arbeiten mit getrennten Stromversorgungen für die Elektronik und die Motoren um Spannungseinbrüche für die Elektronik zu vermeiden.
Die Arme
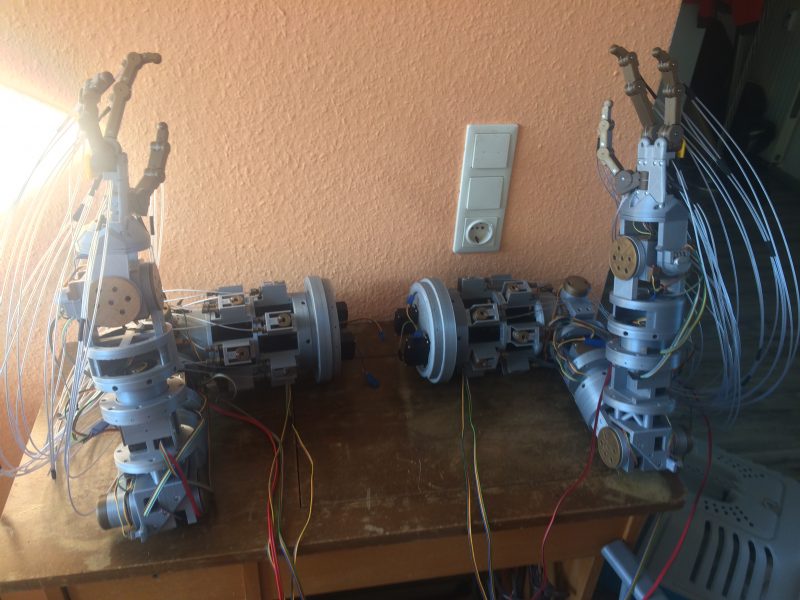 Die Arme von Roberry verfügen wie die Arme von Ralph und Flori ein dreigeteiltes Schultergelenk: – Den Arm nach vorne und hinten schwenken – Den Arm seitlich abspreizen – Den Arm drehen
Die Arme von Roberry verfügen wie die Arme von Ralph und Flori ein dreigeteiltes Schultergelenk: – Den Arm nach vorne und hinten schwenken – Den Arm seitlich abspreizen – Den Arm drehen 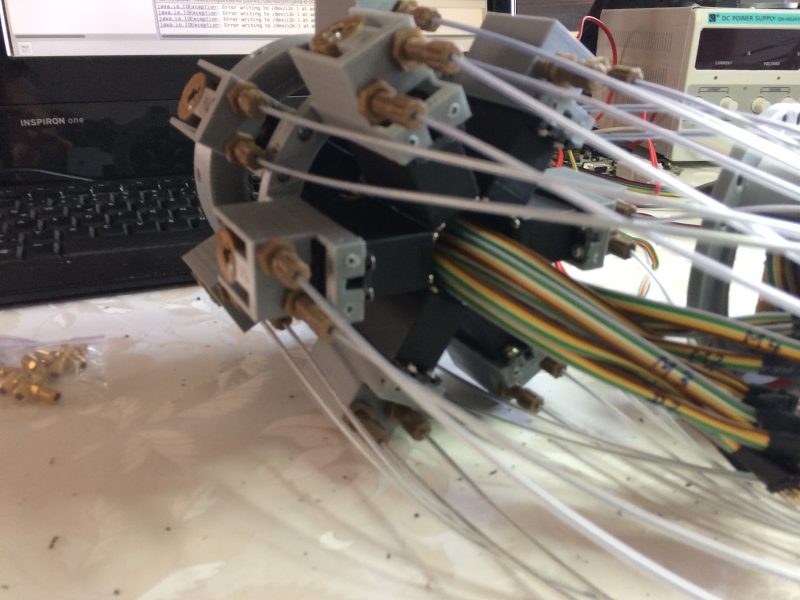 In dem Bild sind zwischen dem Gelenk zum schwenken des Arms nach vorne und Hinten noch zwei Reihen sternförmig angeordneter Servos für die Hände vorhanden. Da die Hände neu konstruiert werden (mehr siehe weiter unten) ist dies inzwischen auf eine Reihe reduziert.
In dem Bild sind zwischen dem Gelenk zum schwenken des Arms nach vorne und Hinten noch zwei Reihen sternförmig angeordneter Servos für die Hände vorhanden. Da die Hände neu konstruiert werden (mehr siehe weiter unten) ist dies inzwischen auf eine Reihe reduziert.  Das Gelenk zum Heben der Schulter, der Ellenbogen und das Handgelenk basieren alle auf einem einheitlichen Basisentwurf der nur geringfügig für den jeweiligen Verwendungszweck angepasst werden musste. In der Mitte befindet sich ein Würfel, in dem zwei Servos platz finden. Sind diese um 90 Grad versetzt erhält man ein X-Y-Gelenk, werden diese um 180 Grad versetzt erhält man ein einfaches Kippgelenk das mit zwei Motoren betrieben werden kann (nur einer der Servos enthält dann eine Elektronik und die Motoren sind parallel geschaltet).
Das Gelenk zum Heben der Schulter, der Ellenbogen und das Handgelenk basieren alle auf einem einheitlichen Basisentwurf der nur geringfügig für den jeweiligen Verwendungszweck angepasst werden musste. In der Mitte befindet sich ein Würfel, in dem zwei Servos platz finden. Sind diese um 90 Grad versetzt erhält man ein X-Y-Gelenk, werden diese um 180 Grad versetzt erhält man ein einfaches Kippgelenk das mit zwei Motoren betrieben werden kann (nur einer der Servos enthält dann eine Elektronik und die Motoren sind parallel geschaltet).  Die Servos treiben ein Planetengetriebe an, auf dem ein Zahnkranz zur Übertragung der Bewegung sitzt. Das Poti zur Stellungsrückmeldung sitzt entweder über dem Planetengetriebe (Kippgelenk) oder wird als zweite Achse des Gelenks eingesetzt (X-Y-Gelenk). Unterhalb des Ellenbogens sind ein Drehgelenk und das Handgelenk (als X-Y-Gelenk) für die Hand angebracht. Diese beruhen auf dem zuvor beschriebenen Grundentwurf für Gelenke.
Die Servos treiben ein Planetengetriebe an, auf dem ein Zahnkranz zur Übertragung der Bewegung sitzt. Das Poti zur Stellungsrückmeldung sitzt entweder über dem Planetengetriebe (Kippgelenk) oder wird als zweite Achse des Gelenks eingesetzt (X-Y-Gelenk). Unterhalb des Ellenbogens sind ein Drehgelenk und das Handgelenk (als X-Y-Gelenk) für die Hand angebracht. Diese beruhen auf dem zuvor beschriebenen Grundentwurf für Gelenke.
Die Hand
 Die Hand hat derzeit drei Finger inclusive Daumen, ist aber nicht richtig funktional. In dem bisherigen Entwurf sind die Finger dreigliedrig, wobei jedes Gelenk durch einen Servo per Bowdenzüge bewegt wird. Die Servos sind wie weiter oben beschrieben an der Schulter platziert um das Gewicht des Arms im unteren Bereich zu reduzieren. Leider machen hier die Bowdenzüge Probleme. Die Enden, die direkt in die Finger eingearbeitet sind drücken sich nach und nach zusammen, die Züge werden schwergängig und brechen in Folge. Eine neue Konstruktion mit fünf Fingern ist in Planung. Bei dieser wird nur noch ein Servo den gesamten Finger krümmen. Zusätzlich wird es ein Gelenk geben, mit der der Daumen wie bei einer menschlichen Hand im Winkel verändert werden kann (Greifen oder Keyboard spielen 😉 ).
Die Hand hat derzeit drei Finger inclusive Daumen, ist aber nicht richtig funktional. In dem bisherigen Entwurf sind die Finger dreigliedrig, wobei jedes Gelenk durch einen Servo per Bowdenzüge bewegt wird. Die Servos sind wie weiter oben beschrieben an der Schulter platziert um das Gewicht des Arms im unteren Bereich zu reduzieren. Leider machen hier die Bowdenzüge Probleme. Die Enden, die direkt in die Finger eingearbeitet sind drücken sich nach und nach zusammen, die Züge werden schwergängig und brechen in Folge. Eine neue Konstruktion mit fünf Fingern ist in Planung. Bei dieser wird nur noch ein Servo den gesamten Finger krümmen. Zusätzlich wird es ein Gelenk geben, mit der der Daumen wie bei einer menschlichen Hand im Winkel verändert werden kann (Greifen oder Keyboard spielen 😉 ).