Im Jahr 2012 stand Claus wie schon öfter mit großen Augen in einem Spielwarengeschäft vor dem Karton einer Lego Mindstorm NXT. Dieses Mal war es Ende des Jahres, das Weihnachtsgeld war gerade auf dem Konto, und Claus hatte noch kein Geschenk für sich selber.
Kurz hin und her überlegt und dank der wunderbaren Erfindung der EC-Karte ging Claus wenig später mit einer richtig großen Tüte aus dem Geschäft.
Bis Weihnachten mit dem Auspacken warten war natürlich unmöglich. Also schnell nach Hause und Lego bauen.
Nach zwei Tagen reichte es nicht mehr mit der Ablaufsteuerung die Programme zu erstellen. Also stieg Claus schnell auf Robot C um. Hiermit wurde zum Beispiel ein Segway mit Hinderniserkennung gebaut.
Aber eine Kartografie der erkannten Hindernisse und abgefahrenen Wege war mit dem NXT-Baustein nur schwer möglich. Dem entsprechend erfolgten die weiteren Programmierungen auf einem PC. Der NXT-Baustein wurde nur noch zum Anschluss der Motoren und Sensoren genutzt.
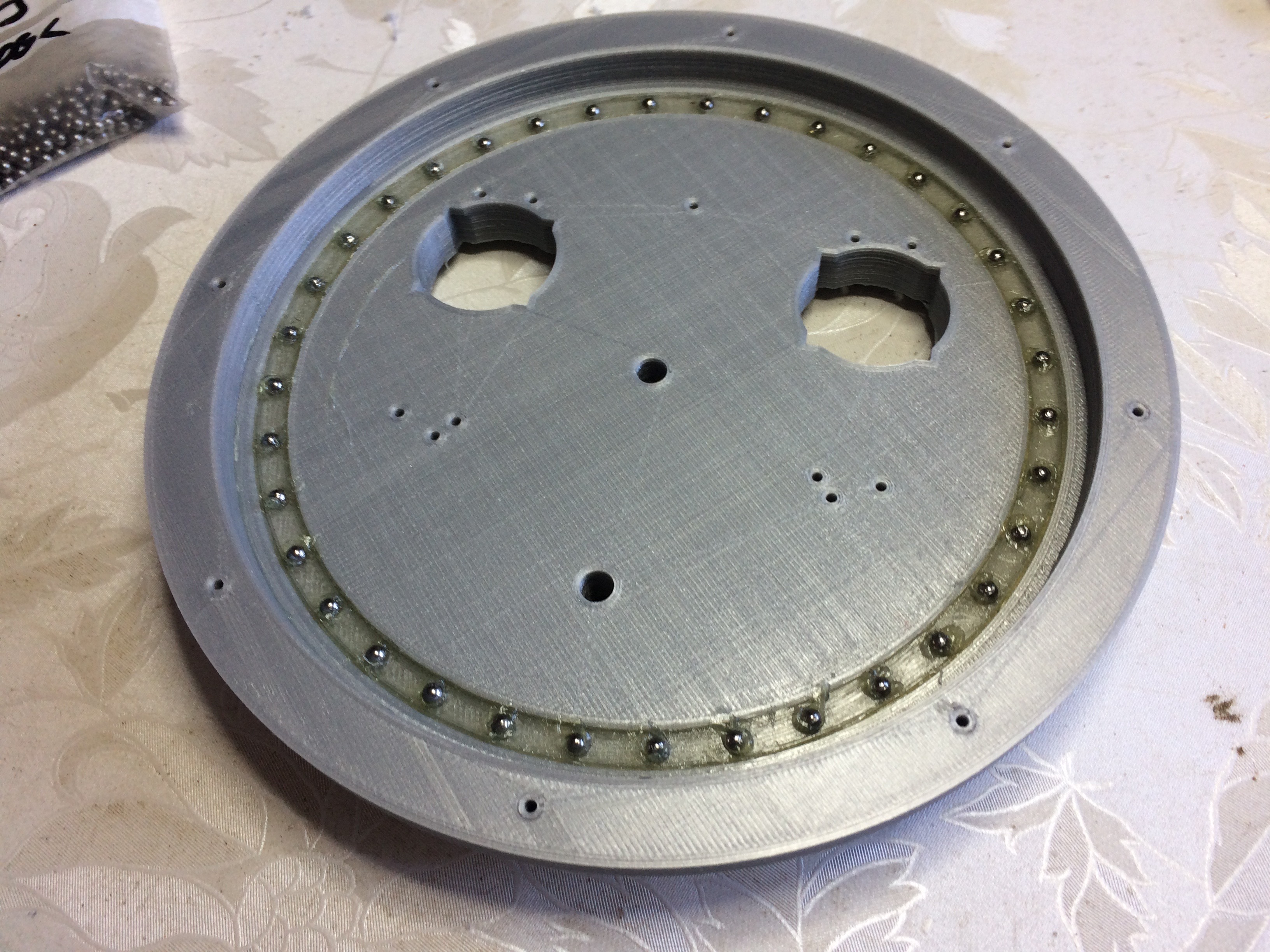
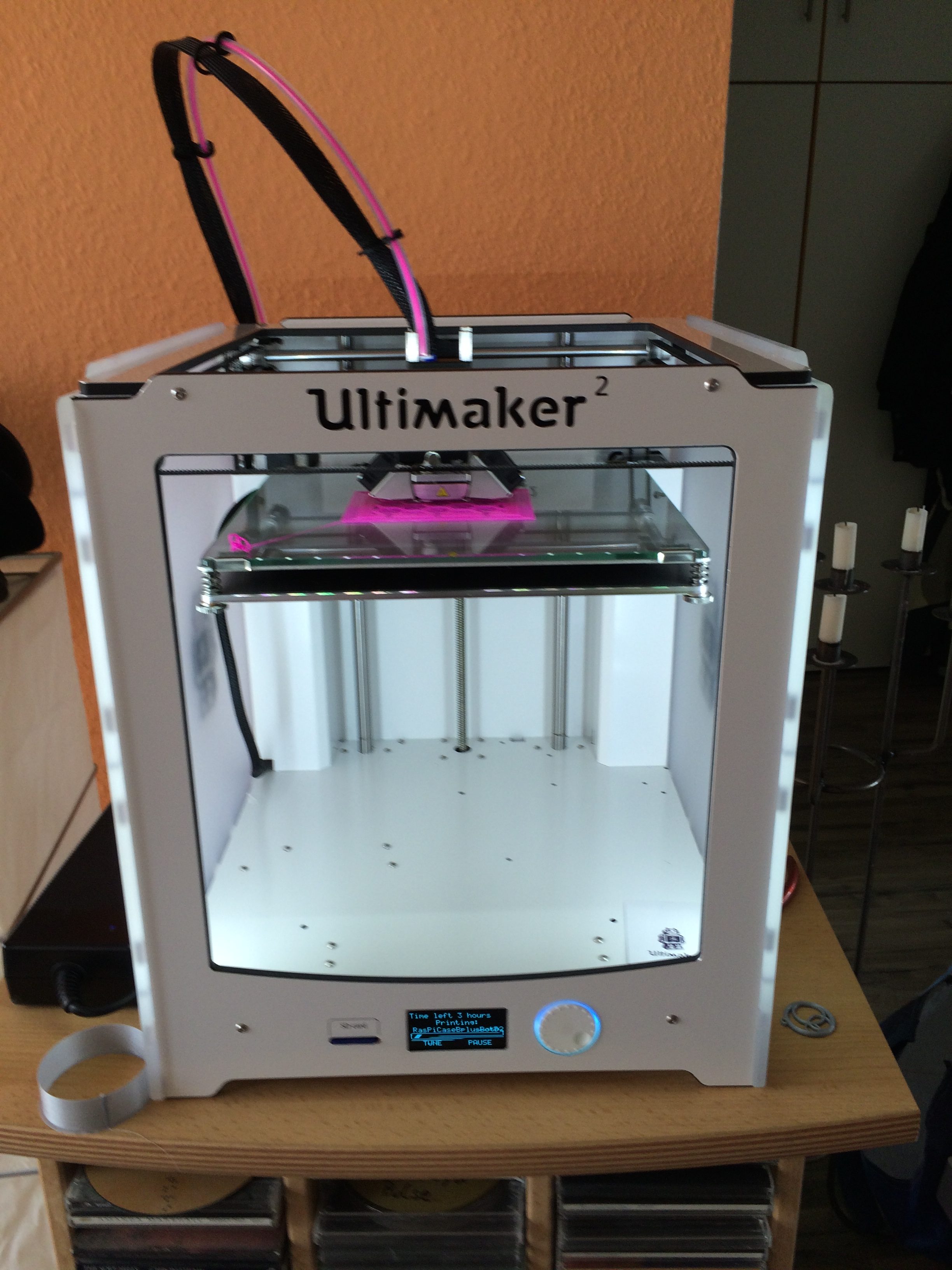
Da die Möglichkeiten der Legobauteile nach und nach auch nicht mehr ausreichten kam Mitte 2016 ein 3D-Drucker dazu.
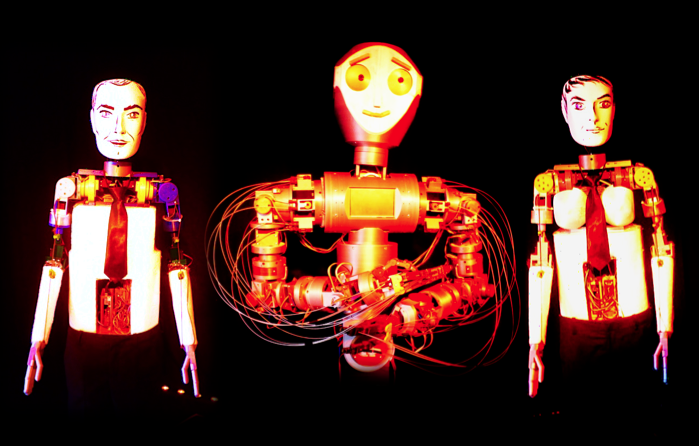
 Nachdem eine erste Hand fertig war wurde Claus die Frage gestellt “Und wie soll der Roboter aussehen wenn er fertig ist?“. Claus hatte noch keine klare Vorstellung als eine Freundin meinte “Wie das Helferlein von Daniel Düsentrieb!“.
Nachdem eine erste Hand fertig war wurde Claus die Frage gestellt “Und wie soll der Roboter aussehen wenn er fertig ist?“. Claus hatte noch keine klare Vorstellung als eine Freundin meinte “Wie das Helferlein von Daniel Düsentrieb!“.

Schnell war im Internet ein kompletter Bauplan gefunden. Ok, vielleicht müssen noch ein paar kleinere Details ausgearbeitet werden – aber als Basis schon ganz gut.
Die Arme, Beine und der Rücken werden also rund und möglichst flexibel. Brustkorb und Hüfte werden röhrenförmig.
Den Kopf als Glühbirne? Na, das ist dann doch für den Anfang ein wenig zu anspruchsvoll. Aber grob die Formgebung ist ok.
Die erste Version des Armgelenks war leider nicht sonderlich stabil.
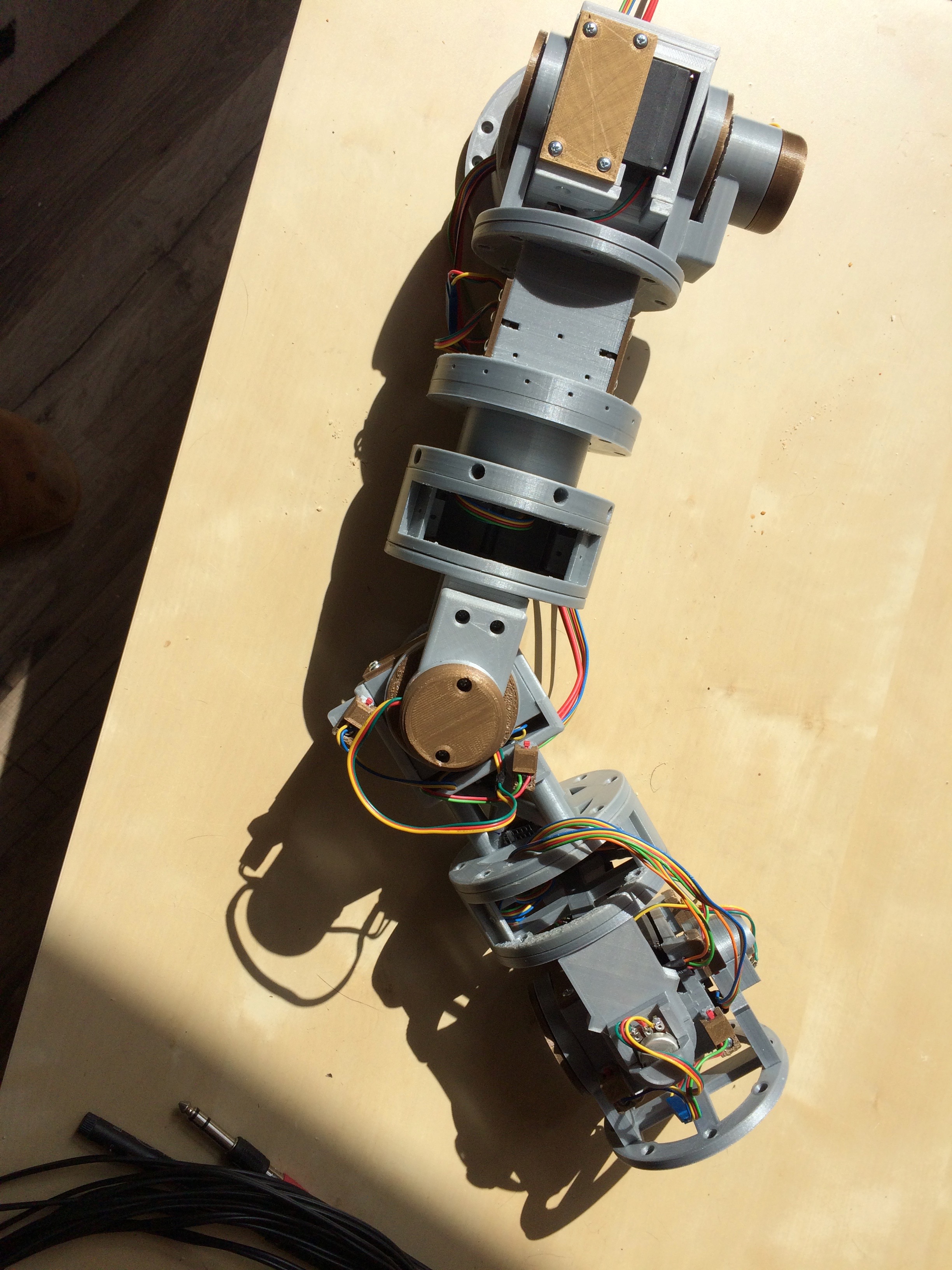
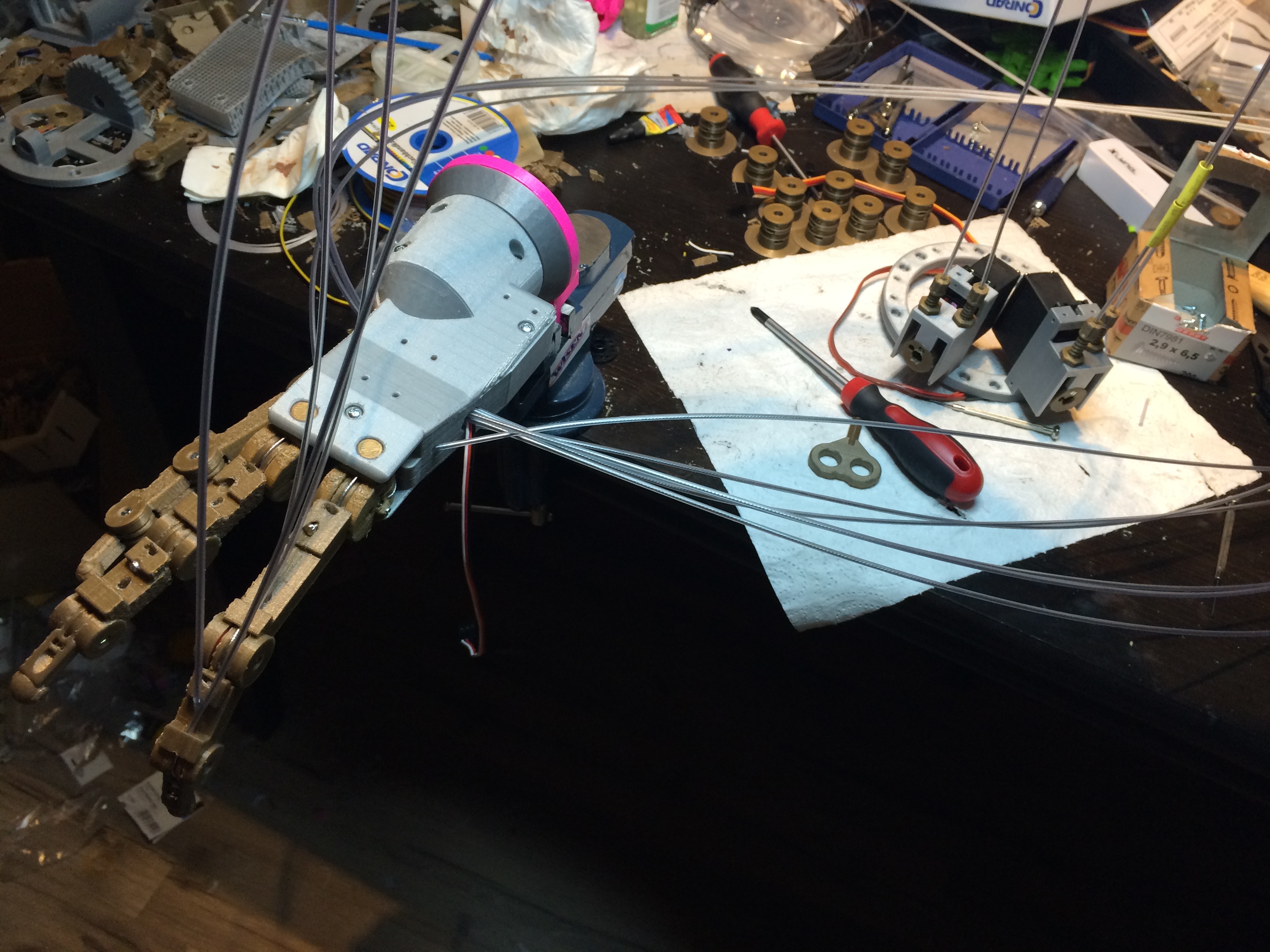
 Im zweiten Anlauf wurde ein komplett neues Gelenk konstruiert. Dabei wurde ein stärkerer Servo verwendet und hinter den Servo noch ein Getriebe gesetzt.
Im zweiten Anlauf wurde ein komplett neues Gelenk konstruiert. Dabei wurde ein stärkerer Servo verwendet und hinter den Servo noch ein Getriebe gesetzt.
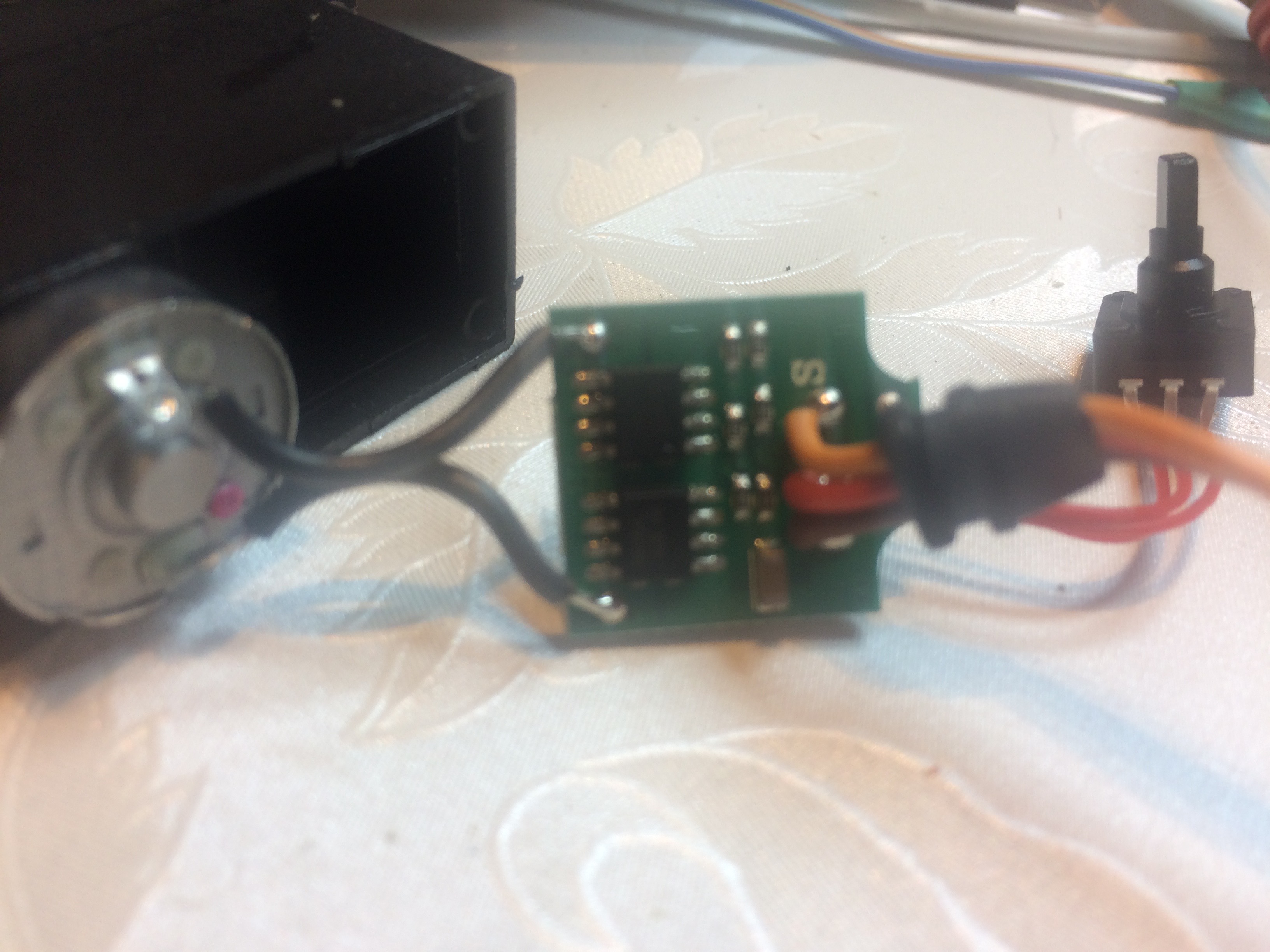
Anfangs wurde noch das Poti aus dem Servo verwendet. Da sich die Verbindung vom Getriebe zu dem Poti oft verschob wurde in Folge ein Standard-Poti mit Metallachse eingesetzt.
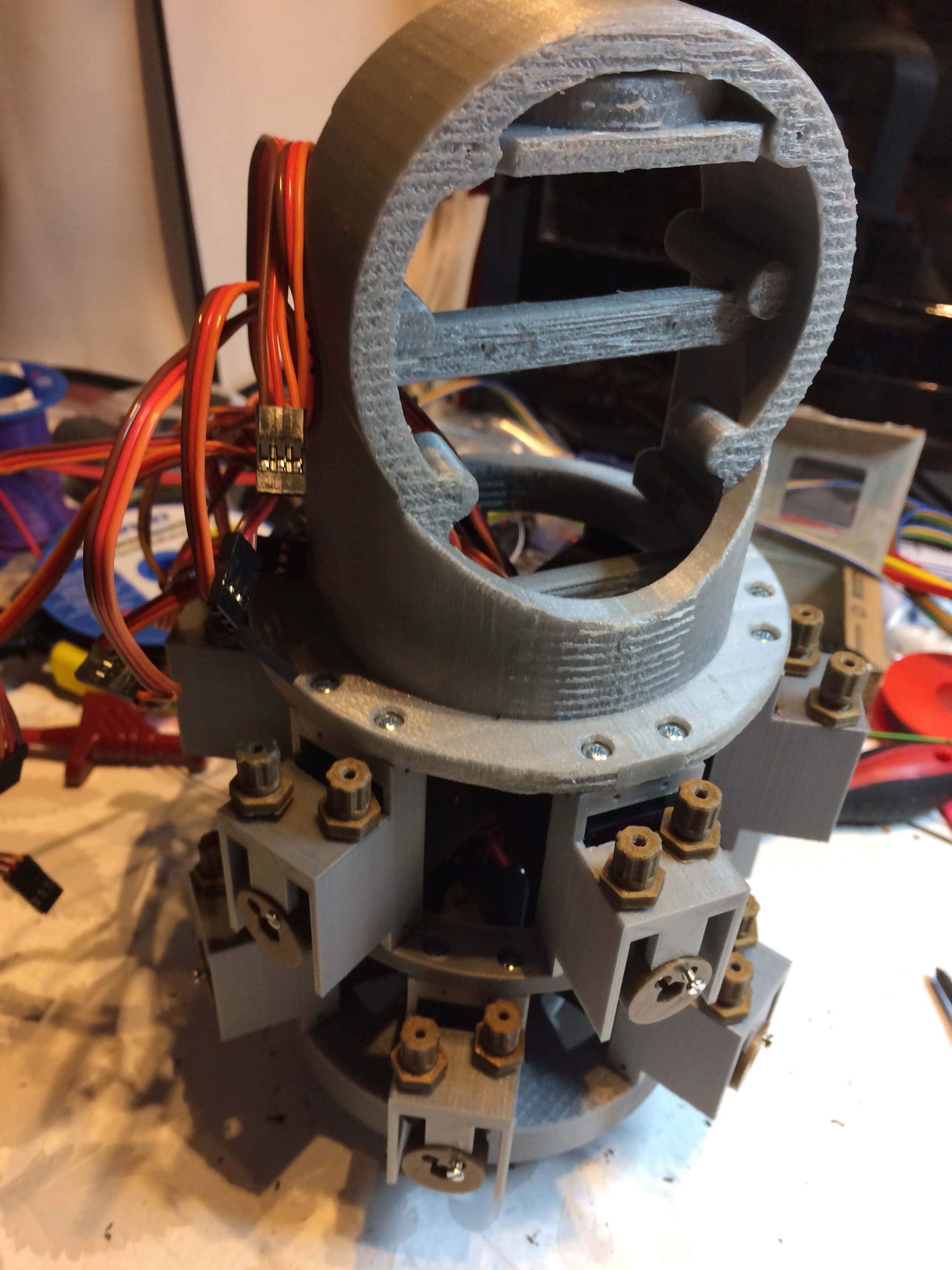
Oberkörper, ein Drehgelenk und die Antriebe für die Finger folgten. Nach einige Versuchen war der Oberkörper und ein erster Arm fertig.
Der Hals folgte. Da der Kopf noch in Mache war wurde kurzerhand ein Blumentopf verwendet.
Auch der Kopf macht Fortschritte.
So war dann nach einiger Zeit ein Grundgerüst fertig. Hier noch einige Fotos:



























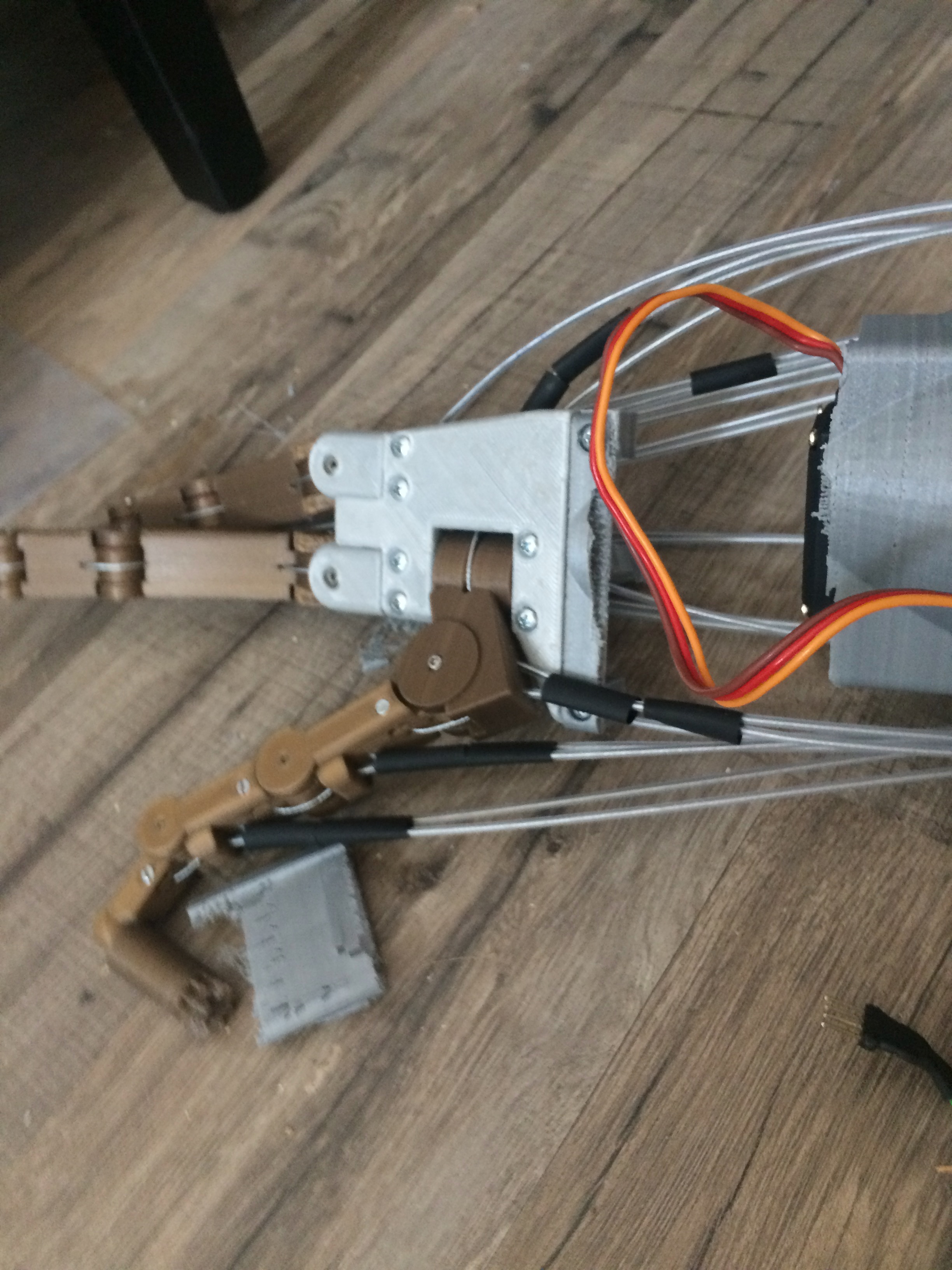
 Detailansicht Hand Roberry
Detailansicht Hand Roberry
Katastrophe! Roberry ist von der Stange gesprungen!










Wieder alles gut …