
 Die Servos der Roboter basieren bis auf die Antriebe im Kopf von Roberry auf Tower Pro MG995.
Die Servos der Roboter basieren bis auf die Antriebe im Kopf von Roberry auf Tower Pro MG995.
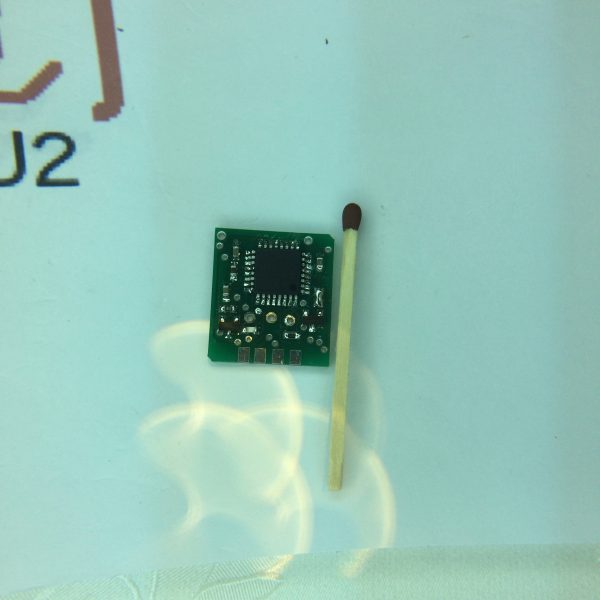
Diese wurden jedoch mit einer neuen Elektronik basierend auf dem OpenSource-Projekt OpenServo ausgerüstet und bei den meisten Servos das Poti zur Stellungsrückmeldung heraus geführt.

Die Platinen wurden im Internet bestellt und selber bestückt. Bevor dieses einer nachmacht sollte er sich dies genaustes überlegen. Es ist eine richtige Fummelsarbeit die SMD-Platinen zu bestücken!
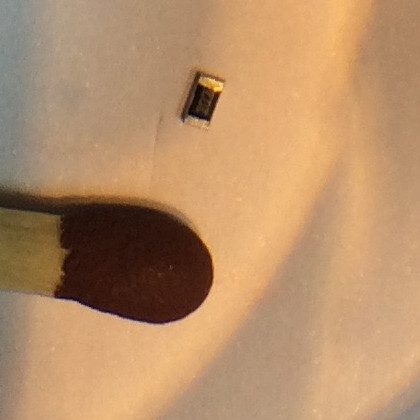
Hier ein Größenvergleich der Bauelemente die mit Pinzette und Lupe verlötet werden müssen:

Ich habe derzeit nur noch vier nicht bestückte Platinen – brauche also in absehbarer Zeit sicherlich neue. Ich überlege ernsthaft diese fertig bestückt zu kaufen.
Aber ok. Wenn die Elektroniken einmal fertig sind und mit der Software versehen sind geht der eigentliche Umbau der Servos recht schnell.

Als erstes werden die alten Elektroniken entfernt.

Wenn jemand interesse an PWM-Elektroniken von MG995-Servos hat kann er sich gerne bei mir melden 😉
In Abhängigkeit davon ob der Servo direkt betrieben wird oder ein Getriebe mit dahinter sitzendem externen Poti zur Stellungsrückmeldung betrieben wird muss der Anschlag im Getriebe entfernt werden.

Um die neue Elektronik einzubauen muss man das Gehäuse ein bisschen mit einem Minidrill kitzeln. Der 8-Polige Anschluss der Platine braucht platz. Zudem muss ggf. das Kabel für das Poti und für den Anschluss eines zweiten parallel laufenden Motor ausgeführt werden. Ich mache dies in der Regel seitlich.
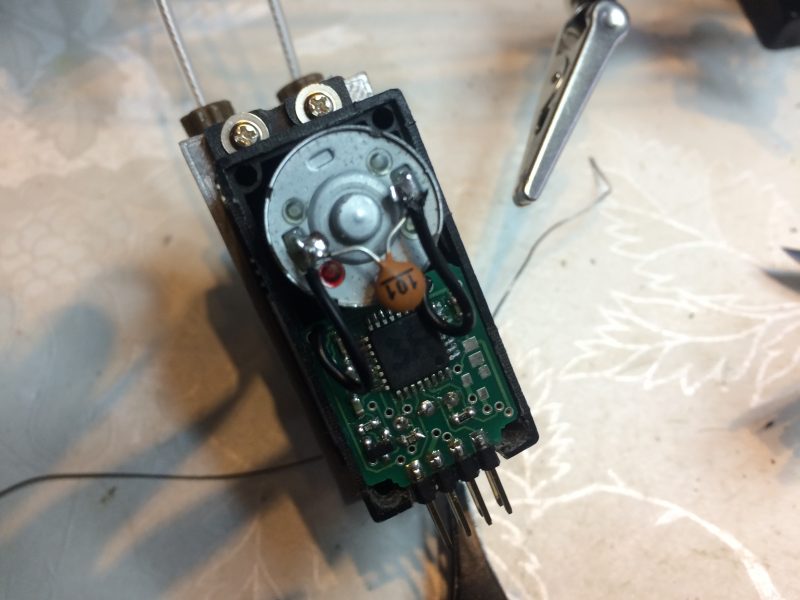
Dann nur noch die neue Platine einlöten, ein kleines C-chen über den Motor, schließen und starten.
Die Adresse so wie der Regelparameter des Servos können per I2C konfiguriert werden und auf dem internen EEProm des Mikrocontrollers (ATMega 168) permanent abgespeichert werden.